One of the topics in physics that drove me almost crazy 48 years ago was a paradox related to the relativistic length contraction effect. This effect is an elementary consequence of Einstein’s Special Theory of Relativity [STR]. Paradoxes in this context are almost always based on two separate, but seemingly consistent descriptions of a series of kinematic events in two inertial frames. These descriptions seem to lead to contradicting results.
One such paradox is the “rod/slot paradox” – a variant of the Rindler-Shaw paradox. Let us call it RS-paradox below. It says that in one inertial frame a falling rod will move through a slot in a plate (or in the ground) – and in another frame it would not. In both (!) cases due to the length contraction effect. (I will present a related scenario in more detail below.)
Physics students get trained to achieve consistent descriptions of natural events independent of their choice of a “frame of reference” (a defined coordinate system) – and in particular independent of a choice between coordinate systems of so called “inertial systems” (which move with constant velocity vs. each other; see below). Inertial systems are fundamental in physics. The equivalence and the consistency of physical statements as well as measurements in inertial frames are mandatory for the correct formulation of the basic laws of physics. No wonder that unresolved paradoxes resulting from transitions between such reference frames may drive some students of physics crazy.
I got confronted with the RS-paradox for the first time when I was 17 and visited a physics course in a German Gymnasium. Special Relativity [SR] was a topic that occupied us for a few months. Our teacher presented us the RS-paradox with the help of a “ski-jumper” (see below) falling or not falling through a slot in the ground. My teacher admitted that he could not resolve the paradox for us – and as so many teachers (and introductory text books) he referred to a complicated theory of Rindler regarding modifications of stiffness and elasticity in the STR. This was, however, not very satisfactory for us students. Rightfully, we had the suspicion that a basic contradiction like the one given above should disappear already on a very basic level of argumentation.
The paradox gave me some sleepless nights in 1976, until I gave up at that time and trusted in some personal breakthrough in the future. Later, at university and during my PHD, I just applied SR-formulas whenever necessary. No time for deeper explanations of paradoxes. However, some years ago – long after my professional time in physics – the problem entered my mind again. I used some relaxed time in Norway to work a bit with it once again. And this time I could resolve it in a personally satisfactory way. As the basic points of the solution are in the end rather simple, I would like to present them here in a post series – and maybe save some physics students a few sleepless night.
So, this is a post series for folks interested in physics and math.
Editorial Hint: This post has been changed and rewritten on 10/24/2024 and 12/06/24. Sorry for any inconvenience. On 02/28/25 I have added a list of links to all other posts in this long series on the rod/slot paradox. I have also mentioned the effect of Thomas-Wigner rotation, which resolves the paradox, and for which our mathematical discussion will deliver very clear and stunning examples.
Requirements
Requirements regarding math are:
- You should be familiar with the idea of a 2- or 3-dimensional Cartesian coordinate system. Although it would in principle be possible to use coordinates systems with curvilinear coordinates (as e.g. spherical coordinates) we will refrain from doing so for the sake of mathematical simplicity.
- You should have an elementary idea of position and velocity vectors defined in an Cartesian coordinate system and what their components mean.
- Our topic requires various changes of the point of view and between multiple Cartesian coordinate systems attached to different objects in motion. This may require rotations of the Cartesian coordinate systems – or equivalently projections of position and velocity vectors onto differently oriented axes. We will derive respective data by elementary rules of geometry.
- You should not be afraid of formulas, some geometry and elementary trigonometric relations.
Requirements regarding physics are the following:
- You should have learned about inertial frames and reference frames. For short definitions see below.
- You should be familiar with the Lorenz-transformation [LT] in STR in its elementary form. This covers the relation of coordinate measurements performed in two reference frames with their x-coordinate axes aligned along the line of their relative relative motion. The LT formulas then directly affect only the transformation of the x-coordinates and of the time coordinates of events between the inertial frames. y– and z-coordinates of events remain the same.
- You should be familiar with the effect that events observed to occur simultaneously in one inertial frame may be measured to occur at different points in time in another inertial frame.
- You should have understood the term “proper length” for the length of an object measured in a reference frame in which the object is at rest.
- You should also have learned about the length contraction effect – i.e. the effect that the length of a moving stick is measured to be shorter than the length measured in a frame where the stick is in rest – and the related premises. This includes the correct measurement procedure for the determination of the spatial distance between two events in an inertial system. To do this correctly the spatial coordinates of the events must be determined at the same point in time in the respective reference frame.
- You should know about the time dilation effect – and how it is derived from the LT formulas. You should be aware of its impact on the different velocity components of moving objects measured in different reference frames.
My main target group of readers are interested students attending a physics course in high school or in a German gymnasium. They are, in my opinion, already fully equipped to resolve the rod/slot paradox without complex matrix and vector formalisms taught at university.
Potential rewards for the reader
On our long and detailed journey, you will train practical applications of the standard formulas for the Lorentz Transformation which you may have learned at school, already. But, in this post series we will deal with objects moving in two dimensions, sometimes on diagonal paths with respect to a chosen reference frame. We will sometimes use rotated Cartesian coordinate systems to achieve our obejctives.
Another aspect is that you will see that we can define different possible scenarios for the rod/slot movements. The respective encounters of the rod and slot will have very different outcomes: In a collision scenario the rod and impenetrable plates around the slot will crash inevitably. In a transit scenario, however, the rod will move through the slot unharmed. So, we must take care of the precise initial conditions of the movements of the rod and the slot in a 2-dimensional space.
By shifting our perspective and measurements to observers attached to the moving objects you will step by step get acquainted with a relativistic effect not taught at school: The so called Thomas-Wigner rotation and resulting inclination angles of diagonally moving elongated objects in certain frames of reference.
At the end of his post series you will hopefully have understood that it a complete disregard of this effect in the standard presentation of rod/slot scenarios causes the paradox. And, actually, there are no inconsistencies in a proper relativistic description of such scenarios, at all. A properly applied LT will remove any contradictions in a fully understandable way.
Inertial frames, reference frames and events
I shortly give a short definitions of some important terms.
- An “inertial frame” is one in which any object that experiences no force moves with zero or constant uniform velocity along some straight line.
- An inertial frame thus is one that moves with constant velocity (along a straight line) relative to another such frame or relative to some force-free objects under observation.
- We define a “reference frame” in our context as a coordinate system of an inertial frame. As said above we will use Cartesian systems to cover the spatial coordinates.
- We will often compare observations made in one inertial frame with those of an observer in another inertial frame. To do so we need to compare the spatial and time coordinates determined in each of the respective reference frames for distinct events. An event is (among other things) characterized by its spatial coordinates and its time coordinate.
- Each of the respective coordinate systems will have a defined orientation with respect to the constant uniform velocity of the reference frames’ movement versus one another.
- An observer in an inertial system reflects a dense coverage of the space by synchronized clocks in the sense that the observer has access to precise time data for all events measured at spatial positions in our coordinate systems. This is to a certain degree a theoretical idealization. The important point is the synchronization of all clocks in a reference frame ahead of any measurements.
Flat Euclidean geometry
We work in a standard Euclidean space of two or three dimensions: In such a “flat” space the standard laws of Euclidean geometry, which one learns in high school, apply. Space or space-time have no “curvature”. The spatial geometry in our inertial frames follows Euclidean laws globally. E.g. the law of Pythagoras holds everywhere and over long distances. In this respect STR is different from Einstein’s “General Theory of Relativity”. Just to remind us about this, I will use the abbreviation ECS for the (Cartesian) coordinate system of an inertial frame in our pure STR context.
Discussion of collision and collision-free scenarios
I will start this series with a simple naive presentation of the RS-paradox below. Later on, I will turn to a precise and detailed description of a “collision scenario“. I will set up a special thought experiment, in which a rod approaches a plate with a slot with a constant relative velocity along a diagonal line. The orientation of the rod and the slot will be aligned in a certain reference frame. Afterwards, I will define further main reference frames to cover the scenario from different perspectives.
For the collision scenario an observer in one of the frames clearly predicts a collision between the rod and the plate, while in the another frame one could naively expect the opposite, namely a transit of the rod through the slot. I will investigate some key events and apply the Lorentz transformation to describe the events in all reference frames.
We will see that the mathematics of the transformation equations will provide us with some valuable insights, which in the end help to grasp the cause of paradoxes. After having resolved the paradox for the “collision scenario” I will turn to a second collision-free “transit scenario” and present a detailed discussion for it – including three different observer perspectives. Eventually, we will come to the following conclusion:
If an observer in a selected reference frame predicts a collision or a transit, then also observers in other reference frames will predict a collision or a transit, respectively. The measurements performed by different observers will not contradict each other for either scenario. Instead we have to conclude that a collision scenario differs in its initial conditions fundamentally from a transit scenario – in all relevant reference frames.
What we will come to understand is that both scenarios should not and cannot be mixed – as it is (unfortunately) done in usual presentations of the RS-paradox. Actually, the paradox does not exist; it results from presenting two scenarios as fully equivalent, while they are not.
A typical naive presentation of the paradox
My teacher described the RS-paradox in the following way: He used a (somewhat nonphysical) ski-jumper with long skis who jumped from a height h down to the flat ground having a slot and a cave below it.
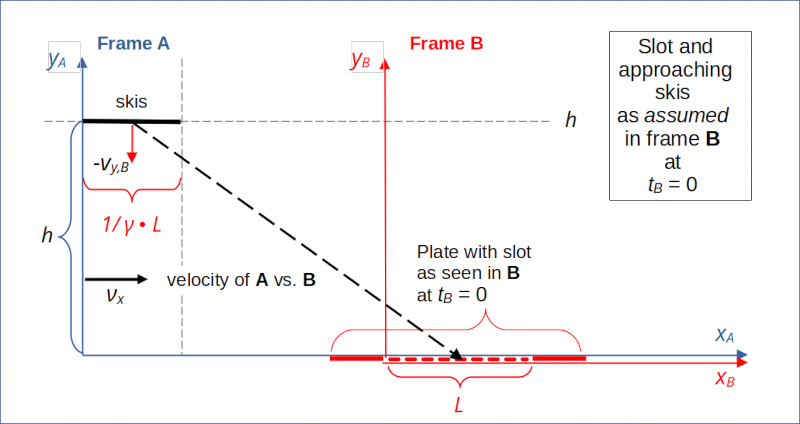
Illustration 1: Skis approaching a horizontally aligned slot in the ground.
He suggested a frame of reference B fixed at the ground. Frame B was equipped with a 2-dimensional spatial coordinate system with the xB-coordinate axis stretching in parallel to the ground and a yB-coordinate axis pointing vertically upwards. All clocks in the spatial grid of frame B were synchronized. Events were described via space and time coordinates [xB, yB, tB].
The ski-jumper was assumed to move with two constant velocity components in frame B: vj,x,B = const parallel to the ground and νj,y,B = νy,B = const in vertical direction down towards the ground, i.e. νj,y,B < 0 (νj,y,B = – vy,B = const) . In contrast to a real ski-jump a constant velocity in y-direction is, of course, a simplification.
The jumper’s skis were always oriented in parallel to the ground, i.e. in x-direction. (By whatever means the ski-jumper managed to control this.) The skis had a proper length Lski = L. I.e. this length was measured when the skis were at rest.
At the position where the ski-jumper would touch the ground ground a wide slot was assumed to exist (in the ground) with a proper length L in x-direction (measured in frame B). The slot had a fixed position in B. The velocities of the jumper were defied such that the middle of the skis touched ground in the middle of the slot (in x-direction). Below the slot some underground cave was located with big dimensions in all directions. Anyone falling through the slot would end up in this cave.
Because of the assumption vj,x,B = νx = const., our teacher could introduce a second frame A co-moving with the ski-jumper in x-direction. Frame A had its own coordinate system with synchronized clocks everywhere. The orientation of the x- and y-axes in A were the same as in B. Observers in A registered events with coordinates [xA, yA, tA]. A moved relative to B with velocity vA,B = vx. The x-axis of A overlaps with that of B. The ski-jumper thus moved in A with negative velocity vj,y,A = -vy,A = const. in y-direction. (vy,A typically is not identical to νy,B due to the rules of velocity transformations in the STR).
At time tA = tB = 0 the ski-jumper was at a position xB = 0 and yB = h in B – having already reached his constant velocity components. (We safely ignore the problem of how we had accelerated the jumper to reach these velocities).
Assumed description of the situation in reference frame B with the slot at rest
In our reference frame B the ski-jumper moves in diagonal direction towards the ground. Due to the length contraction effect the ski-length measured in B becomes shorter than their proper length L [Lski,B < L], while the slot keeps up its proper length L [Lslot,B = L]. Therefore, we might think that the ski-jumper will fall into the cave. It, at least, sounds logical …
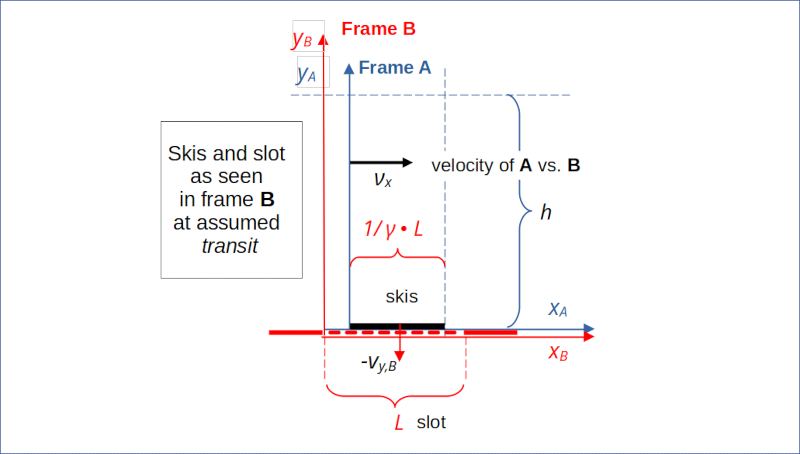
Illustration 2: Assumed transition of the rod as seen from frame B
Assumed description in a reference frame A co-moving with the the ski-jumper in x-direction
Now let us look at a seemingly natural description of the same scenario by an observer in frame A.
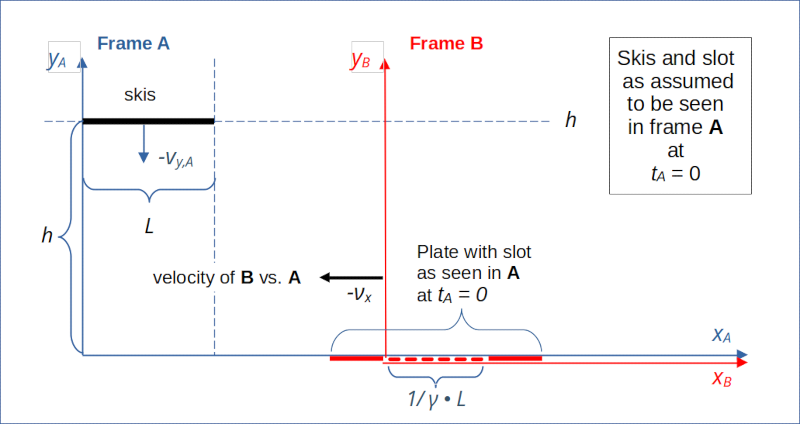
Illustration 3: Assumed description of the scenario from the perspective of frame A
This observer would find a horizontal velocity of the jumper νj,x,A = 0. We ignore the question about the value of the constant vertical νy,A for the time being. In frame A the skis are in rest regarding their horizontal movement. Therefore, their length is Lski,A = L. However, due to length contraction the length of the slot moving with velocity vslot,A = – νx relative to A is found to be shorter than L: Lslot,A < L. Therefore, we come to the conclusion that the ski-jumper will not fall into the cave, but instead experience a hard landing.
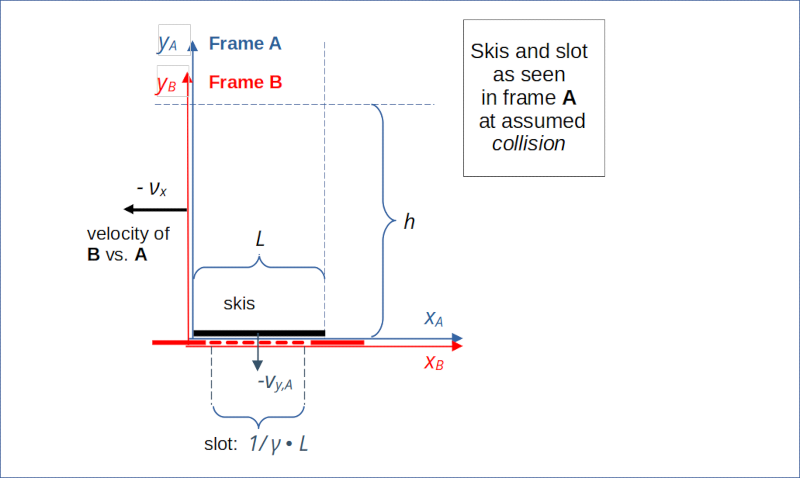
Illustration 4: Description of a collision from the perspective of frame A.
We have a paradox, as both descriptions appear to be right. Nevertheless, they obviously lead to a severe contradiction. One, of course, suspects a mistake in the assumptions or, maybe, in an improper application of the Lorentz Transformation. But what is actually wrong with the presentation above, might be difficult to identify without a detailed and mathematical analysis. This post series will provide such an analysis.
Other variants of the paradox exist in which no vertical movement happens, but gravity is assumed to work when a fast “ski-glider” moving horizontally passes the slots left end. In my opinion scenarios without gravity, but including a vertical or diagonal movement of the skis or a rod with a constant velocity, are much clearer. Therefore, I will stick to such scenarios.
Diagonal motion of objects and of attached reference frames
Some of the reference frames above display diagonally moving objects (with constant velocity components). What happens when we introduce reference frames attached to such diagonally moving objects? How can we apply the simple 1-dimensional form of the Lorentz Transformation to a given reference frame and another one that moves diagonally in the coordinate system of the first one?
Answer: We cannot apply it directly as the 1-dimensional form of the Lorentz Transformation does not refer to “diagonally” moving reference frames. For a coordinate independent representation of the LT relations we would need a full vector formalism. But, even without a such a formalism, there is, of course, a way out: We can shift the origins of our coordinate systems and rotate our coordinate axes such that the x-axes align with the measured line of relative motion. Afterwards, we may again apply the familiar simple form of the Lorentz Transformation.
So, it is foreseeable that we will sometimes be forced to shift and rotate our coordinate systems. This inevitably will bring trigonometric operations with it. And, beyond trigonometry, there is a major pitfall: Observers in different inertial frames with basically the same orientation of their coordinate axes may measure different angles between their x-axes and the line of their relative (diagonal) motion vs. each other. This may come as a surprise to you – and this interesting point will indeed require some major effort and careful analysis in this post series.
The good news is that math on the level taught at high school or in a German gymnasium is sufficient to cover all of the transformations completely.
How do we proceed from here?
My line of work will be the following: Instead of applying the length contraction directly, I will focus on some events defined by a specific scenario and its initial conditions. I will then apply the Lorentz Transformation to transform the events’ coordinates between my chosen frames of reference. By doing so, we will get a lot of important insights.
But a first step is a more precise definition of a scenario and its initial conditions. In the next post I will turn to the setup of a collision scenario inspired by the last two illustrations above.
Special relativity and the rod/slot paradox – II – setup of a collision scenario
In further forthcoming posts we will learn that the Lorentz transformation implies a rotation of some objects in question. Stay tuned ….
Links to further posts in this series
As our journey is going to be a long one, I give you links to all further posts in this series. Posts II to VII deal with a carefully set up collision scenario, which then is analyzed from the perspective of different observers, in particular observers attached to the moving objects. We show that the LT between these observers give us fully consistent results. Post VIII to XI apply our meanwhile acquired knowledge to a very different transit scenario in which the rod passes the slot. Posts XIII to XVI prepares a Lorentz Transformation of the collision scenario to a specific frame, which moves on a diagonal path relative to our standard setup frame. Posts XVII to XIX show how we can use frames that approach each other on a diagonal path to directly compare the collision scenario with a parallelly developing transit scenario in a common reference frame. The comparison will be based on equivalent slots (regarding length and motion) and rods of the same length in one and the same frame of reference. This will illuminate the roots of the paradox and its wrong assumptions in a striking way.
- Post I: Special relativity and the rod/slot paradox – I – seeming contradictions between reference frames
- Post II: Special relativity and the rod/slot paradox – II – setup of a collision scenario
- Post III: Special relativity and the rod/slot paradox – III – Lorentz transformation causes inclination angles
- Post IV: Special relativity and the rod/slot paradox – IV – consequences of an inclination angle in the slot’s frame
- Post V: Special relativity and the rod/slot paradox – V – perspective of the rod and aspects of the relative velocity between the rod and the slot
- Post VI: Special relativity and the rod/slot paradox – VI – consistency and the Lorentz Transformation between the slot and the rod
- Post VII: Special relativity and the rod/slot paradox – VII – no paradox for a collision scenario and consistency between all relevant LTs
- Post VIII: Special relativity and the rod/slot paradox – VIII – setup of a transit scenario with the rod moving through the slot
- Post IX: Special relativity and the rod/slot paradox – IX – transit scenario and measurements by an observer co-moving with the rod
- Post X: Special relativity and the rod/slot paradox – X – details of the transit scenario as seen by the rod
- Post XI: Special relativity and the rod/slot paradox – XI – Lorentz Transformation between slot and rod for the transit scenario
- Post XII: Special relativity and the rod/slot paradox – XII – images of x,y-coordinate axes after Lorentz transformation to a diagonally moving frame
- Post XIII: Special relativity and the rod/slot paradox – XIII – Lorentz transformation of the collision scenario to a diagonally moving frame
- Post XIV: Special relativity and the rod/slot paradox – XIV – angle between colliding rod and slot in a diagonally moving frame
- Post XV: Special relativity and the rod/slot paradox – XV – velocities of colliding rod and slot in a diagonally moving frame
- Post XVI: Special relativity and the rod/slot paradox – XVI – perception of rod/slot collision in a diagonally moving frame
- Post XVII: Special relativity and the rod/slot paradox – XVII – conditions of the collision scenario as seen in a setup frame for the transit scenario
- Post XVIII: Special relativity and the rod/slot paradox – XVIII – Lorentz Transformation of a transit scenario to the standard setup frame for a collision scenario
- Post XIX: Special relativity and the rod/slot paradox – XIX – perception of transit and collision scenario in a common reference frame
For any questions or corrections feel free to contact me via email.