I continue my post series on the 2-dimensional rod/slot paradox in Special Relativity. In this post we perform a Lorentz Transformation of the rod from a frame A, which we previously used to describe a collision scenario, to a diagonally approaching frame W. In a previous post we have already derived results for the transformed slot coordinates in W. A comparison will show that there is a constant angle between the rod and the slot in W.
Previous posts:
- Post I: Special relativity and the rod/slot paradox – I – seeming contradictions between reference frames
- Post II: Special relativity and the rod/slot paradox – II – setup of a collision scenario
- Post III: Special relativity and the rod/slot paradox – III – Lorentz transformation causes inclination angles
- …
- Post IX: Special relativity and the rod/slot paradox – IX – transit scenario and measurements by an observer co-moving with the rod
- Post X: Special relativity and the rod/slot paradox – X – details of the transit scenario as seen by the rod
- Post XI: Special relativity and the rod/slot paradox – XI – Lorentz Transformation between slot and rod for the transit scenario
- Post XII: Special relativity and the rod/slot paradox – XII – images of x,y-coordinate axes after Lorentz transformation to a diagonally moving frame
- Post XIII: Special relativity and the rod/slot paradox – XIII – Lorentz transformation of the collision scenario to a diagonally moving frame
Proper coordinates of the rod’s right end for a transformation between frames A and W
I remind you of the conditions in frame A at a time ahead of the rod/slot encounter in the collision scenario. The encounter happens at tA = 0. The drawing below shows the relative movement of reference frame W vs. frame A. The origins of the frames coincide at tA = tW = 0. At this point in time also the left ends of the rod and the slot meet.
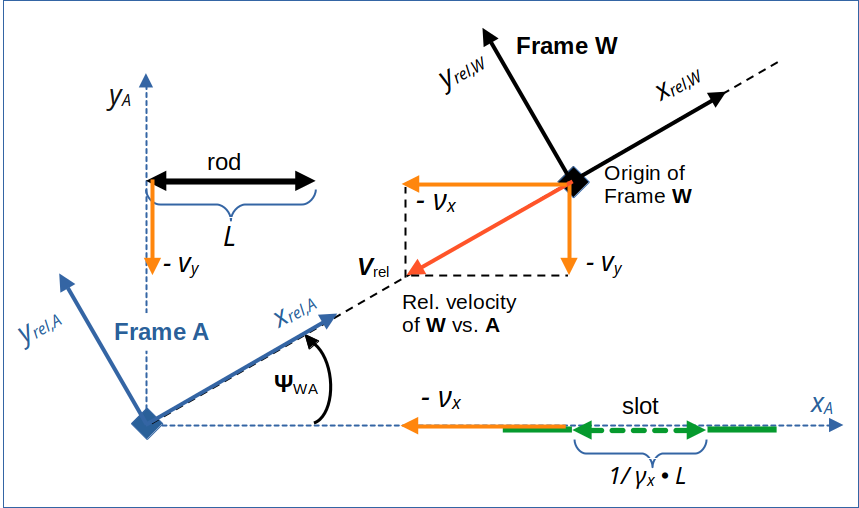
Illustration 1: A diagonally approaching frame W in our collision scenario, which was set up in a frame A (see the first 3 posts of this series). Rod and slot meet each other at tA = tW = 0. For a Lorentz Transformation from A to W we use rotated Cartesian coordinate systems with x-axes oriented along the line of relative motion of the frames.
For details, certain quantities, abbreviations and terminology see previous posts. vrel is the vector of relative velocity of the origins of our two frames versus each other.
At time tA = tW = 0 it is relatively easy to find out how the rod is oriented in W – with respect to the line of relative motion between A vs. W. Analogously to the steps in the 13th post of this series we first calculate components of the position vectors for the rod’s left end right end at tA = 0 with respect to the line of relative motion. The component xr,r,rel,A of the position vector to the rod’s right end parallel to the line of relative motion is
But for the LT to W we have to use a different event to ensure that the respective time coordinate in A is transformed to tW = 0. The velocity components vr,x,rel,A of the the rod parallel to the relative line of motion and the respective vertical component vr,y,rel,A are
From the LT of time coordinates between A and W we derive that we need an event at a point in time
Due to the motion of the right end of the rod we have
This leads to
Which resolves after some intermediate steps to
In turn we get the required xr,r,rel,A-coordinate at tA = tr,r,rel,A :
The respective vertical component of the position vector is
which after some steps gives
Transformation of rod’s coordinates at tA = tW = 0 to frame W
The spatial coordinates of the left end of the rod transform to W simply as
Note that in W we also work with a (rotated) coordinate system that has an x-axis (xrel,W) aligned with the line of relative motion of A vs. W. The LT for the spatial coordinates of the right end of the rod tells us
After some intermediate steps we find
Length of the rod in W
The length of the rod in W becomes
This gives results in
Orientation of the rod in W with respect to the line of relative motion
By using results of preceding posts we get for the angle Ψr,rel,W between the rod and the line of relative motion in W
This means
The rod is smaller than L in W, but there is an angle between the slot and the rod !
For the sine we find
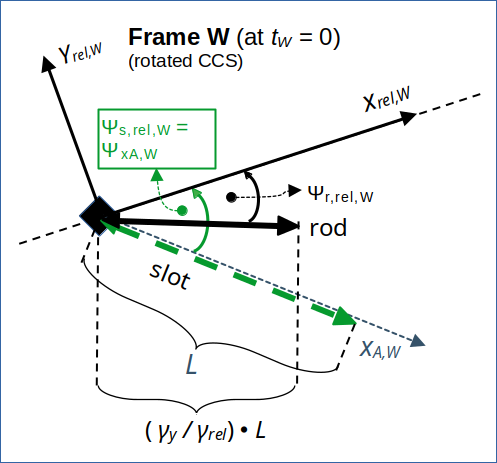
Illustration 2: Rod and slot at tW = 0 in frame W. xrel,W and yrel,W are the coordinate axes of a coordinate system with x-axis aligned with the line of relative motion of A vs. W.
So, seen from the slot the situation is very similar to what we previously found for the collision scenario in frame B. But we have to get an idea about the velocities of the rod and the slot before we understand the resulting kinematics.
Angle between slot and rod in W
From the derived angles of the rod and the slot with the line of relative motion we can now calculate the angle Ψs,r,W between the slot and the rod:
Conclusion
The collision scenario as seen from a diagonally approaching frame appears to be similar to what an observer in frame B sees. There is an angle between the slot and the rod. Both objects are perceived as rotated by different angles against the line of relative motion of our reference frames versus each other. These rotations due to relativity are further examples of the so called “Thomas-Wigner rotation“.
In the next post we want to check what the velocity vectors of both rod and slot in W are and how they are oriented.