In the 2nd post of this series about a variant of the rod/slot paradox in Einstein’s Special Theory of Relativity [STR] we defined a collision scenario between a vertically moving rod and a horizontally moving slot in a special reference frame A. In this 3rd post we apply the Lorentz transformation to some key events. Our objective is to get respective space and time coordinates in a frame B, in which the slot is at rest. We will find that a proper mapping of event coordinates leads to an inclination of the rod with respect to the x-axis and the slot in frame B.
For the initial conditions of the collision scenario see the previous 2nd post and a summary below.
Previous posts:
- Post I: Special relativity and the rod/slot paradox – I – seeming contradictions between reference frames
- Post II: Special relativity and the rod/slot paradox – II – setup of a collision scenario
Summary of initial conditions
The initial conditions of our collision scenario can be taken from the following drawing (and illustration 2 further below).
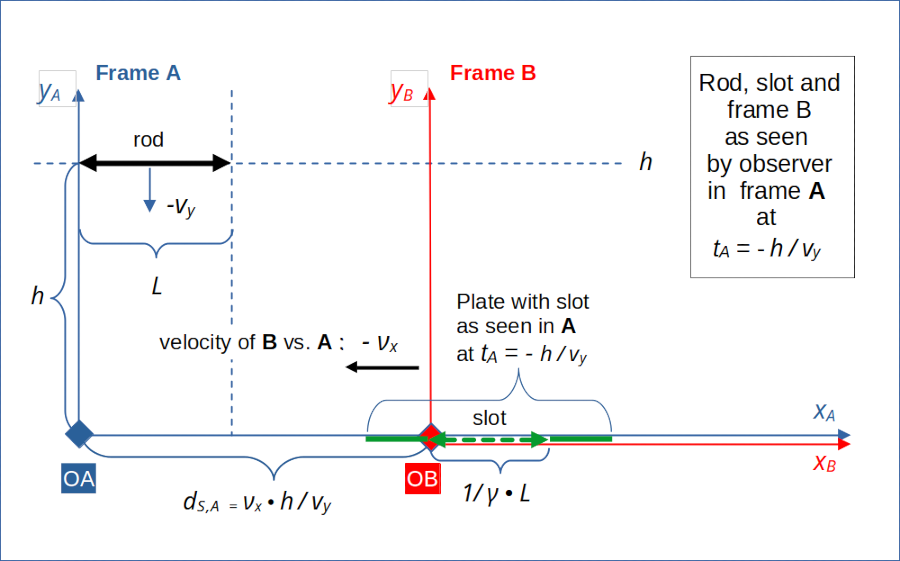
Illustration 1: Initial conditions of the collision scenario
I use sub-scripts A and B below to indicate in which of the frames certain coordinates and quantities are measured.
Summary of the initial conditions of the collision scenario
Seen from the slot, the rod approaches diagonally with constant components of its velocity.
- Both the rod and the slot have a proper length L.
- In frame A the rod rests with respect to its horizontal position. But the rod falls vertically there with a constant velocity vrod,A = -vy.
- In frame B the plate and thus also the slot are at rest (at a vertical position of yB = yA = 0). Frame B is co-moving with the slot.
- Relative to frame A, frame B moves to the left with a horizontal velocity –νx.
- At time tB = tA = 0 the origins of the coordinate systems of frames A and B coincide.
- At time tstart,A = – vy / h in frame A, the rod is located at height yA = h. The rod will reach the vertical position of the slot (yA = 0) at time tA = 0.
- The slot is placed in frame B with its left end at xB = 0. The horizontal distance to the origin of frame A is chosen such that the slot’s left end reaches the rod’s left end at tB = tA = 0.
- Due to the length contraction effect an observer measures the length of the slot in frame A to be Lslot,A = 1/γx • L. (For a definition of the usual γ-factor see below.)
- In frame B the rod moves diagonally, but with a constant horizontal velocity νx and a constant vertical velocity vy,B towards the slot.
These conditions lead to the following encounter of rod and slot at tB = tA = 0 as observed in frame A:
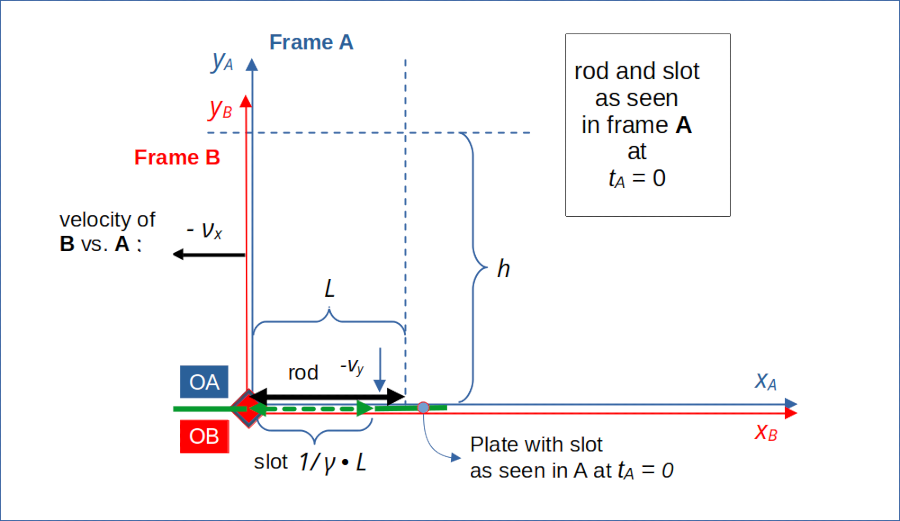
Illustration 2: Conditions at collision as seen in frame A
Due to the relativistic length contraction an observer in frame A predicts a collision of the rods right part with the plate. A potential paradox would exist if an observer in frame B would come to a different conclusion because he/she expects the length contraction to affect the moving rod.
Basic key events in our scenario are defined by their coordinates in frame A. For a further analysis we need to determine respective coordinates in frame B by applying the Lorentz transformation.
Lorentz transformation and the transformation of velocities
For our scenario we describe events in a reference frame A by respective xA-, yA-, tA-coordinates (measured in A):
Besides these coordinates events must be described by other characteristic information. We are in particular interested in events marking the (moving) left and right ends of both the slot and the rod at their encounter in frames A and B.
But let us first write down the required formulas of the Lorentz transformation [LT] of general event coordinates between our two reference frames A and B (and their coordinate systems) :
LT from frame A to B and the reverse LT:
We have implicitly made the standard assumption that the origins of the coordinate systems coincide at tA = tB = 0. c is the the vacuum velocity of light.
As we later will also need factors for relative velocities between frames in y-direction, I introduced the sub-scripts “x” and “y” for β and γ. Without sub-script we refer to factors related to the horizontal relative motions in x-direction.
You may be somewhat surprised about the “+” and “-” signs. You may know the given formulas with reverse signs between a frame S and a frame S’ which moves with velocity vrel in positive x-direction relative to frame S:
Standard version of the LT and its reverse:
The point in our case is that frame B moves in negative x-direction relative to frame A. Let us call the velocity of the slot in A vs,x,A and the relative velocity of B vs. A in x-direction vB,x,A we have:
So, the signs stem from the defined movement of frame B against frame A in negative x-direction. The relative velocity itself is negative.
The above formulas refer to space and time coordinates. An important point in our forthcoming analysis will be based on the Lorentz transformation of velocity components of moving objects.
Standard version of the LT for velocities:
Let us assume that we measure the velocity components (vx,A, vy,A) [in x– and y-direction] of such a moving object in A, then the LT tells us that the respective velocity components (vx,B, vy,B) in B are given by:
Again, the reason for the signs is the negative velocity of B relative to A (in x-direction). Note the difference between the velocity components vx,A and vx,B measured for the moving object in frames A and B, respectively, on the one side and the value of the relative horizontal velocity νx between the frames A and B on the other side.
You may wonder why the velocity component in y-direction experiences a modification, whereas the spatial coordinates in y-direction remain unchanged by the LT. The reason is the time dilation effect experienced between observers in B and observers in A. We shall look at this effect in more detail in a minute.
Note two important consequences of the LT formulas:
- An unchanged y-coordinate does NOT mean that two events measured in A to occur at the same time tA with the same y-coordinate yA, but different xA-coordinates, will be transformed to get the same y-coordinate in B at a common identical time tB in B. Simultaneous events in A may not occur simultaneously in B. This may have an impact on the y-coordinates!
- A pure vertical movement of an object in frame A will lead to a diagonal one in frame B – with a horizontal velocity component vx,A = νx, but a different vertical velocity vy,B ≠ vy,A .
Side remark: An “observer” is in a certain sense represented by a multitude of synchronized clocks placed at all relevant positions in the spatial coordinate system of a reference frame. The “observer” has furthermore means to register measured space and time coordinates of all interesting key events. For practical and experimental purposes you may assume that measured data at distant points are saved in some local protocols which can be evaluated later on.
The rod falls in frame B with a lower vertical velocity than in frame A
Let us first see what the vertical velocity component of the rod object looks like in frame B. To relate a velocity component to the rod, we use a leading sub-script “r“. From the LT formulas above we get (with vr,x,A = 0) :
This is consistent with the fact that due to time dilation any time difference measured in a frame A, which moves with velocity νx relative to frame B, appears stretched in frame B. So, when e.g. the rod falls from yA = h down to yA = 0 in a time interval ΔtA = h / vy, the corresponding time interval in frame B will be measured to be longer, ΔtB = γ • ΔtA :
So, any of the rod’s end points will cover the vertical distance yB = h in frame B with a properly reduced vertical velocity exactly in the prolonged time interval there:
This ensures that our conditions at tB = tA = 0 get fulfilled in B, too: The particular event when the left end of the slot meets the left end of the rod in frame A at tA = 0 occurs in frame B also at tB = 0.
Key events occurring in frame A at tA = 0
Let us now look at some events in frame A characterizing the collision event at tA = 0 = tB. We pick the following events Event 1 (E1) and Event 2 (E2), which occur when the left and the right end of the rod pass the line yA = 0 in frame A.
We relate a coordinate like x, y or t
- to the rod’s left end by a leading sub-script “r” and by a second sub-script “l “,
- to the rod’s right end by a second sub-script “r”
- and to the frame by a third sub-script A or B.
We indicate to which event “En” the coordinates belong by “|En“.
The coordinates of the particular events E1 and E2 are given by:
We have distinguished event E1 for the left end of the rod from event E2 for the rod’s right end because these events may transform differently, in particular with respect to the time coordinate. Due to our scenario’s specific setup (horizontal orientation of the rod in A), these two events do happen at the same time tA = 0 in frame A.
Let us use the Lorentz transformation to find the coordinates of these events in frame B:
This means:
We get something similar for events E3 (left end of rod passing yA = h) and E4 (right end of rod passing yA = h).
That was easy! But let us try to understand these results a bit better …
The rod’s ends do not pass the line yA = 0 at one and the same point in time in frame B
We assume that the rod has been falling with vr,y = – vy already for a while before it passes the lines yA = h at time tstart,A and line yA = 0 at tA = 0 in frame A. The first strange consequence of the above results is:
But, as the rod is moving with velocity νx relative to frame A in our scenario: Should we not expect a length contraction effect for the rod-length in B, i.e. a value Δxrod,B < L?
This is an important point, which deserves some discussion. Any length measurement process is defined such that we should perform coordinate measurements at different spatial positions, but at the very same point in time in a chosen frame of reference (here at some tB in B). The time value must be taken, of course, from synchronized clocks at the positions in question. So, length measurements in x-direction must be based on coordinates of two events with different xB-coordinates, but with one and the same time coordinate tB.
However, our events E1 and E2, which occur at the same time tA = 0 in frame A, transform into two non-simultaneous events occurring at different times in frame B! Something analogous holds for E3 and E4.
Remember a basic consequence of the STR: What happens at the same time in one reference frame, does not necessarily happen at the same time in another frame. This is exactly what we find here:
While the left and the right sides of the rod pass yA= 0 at the same time tA = 0 in A, an observer in frame B finds
- B: The rod’s left edge passes the geometrical point (xB, yB) = (0, 0)B at tB = 0 .
- B: The rod’s right end passes (γx • L, 0)B at a later time tB = γx • νx /c2 • L > 0 .
Again, something analogous is true for E3, E4. The difference in time is in both cases:
So, determining the length difference between the spatial coordinates of these events is not a proper measurement of the length of the rod in frame B.
Consistency Check: So, what would happen if we measured the length of the rod at tB = 0, instead? We then would have to look at a somewhat different event (instead of E2) in frame A. We can use the Lorentz transformation again to get the required corrected point in time for the rod’s right end in frame A:
This tells us that instead of picking E2 ∼ [L, 0, 0]A , we would have to look at an earlier event (for the rod’s right end) in A:
E2R ∼ [ L, νx*vy / c2 • L, -νx / c2 • L ]A in A. The y-coordinate of this event has to be adapted because the rod’s right end has not yet reached yA = 0 at this earlier time
Our 2-dimensional motion enforces more than just a correction of the time coordinate! We need to adapt the y-coordinate, too.
We now transform our particular event E2R from frame A to B to get the following coordinates in B:
We now can directly conclude from the resulting xB-coordinate: This procedure indeed gives us the expected length contraction in x-direction!
Shifts in space and in time – and “perceptions”
The Lorentz transformation tells us that observers in frame B watch events E1 and E2 at different time coordinates. We should, however, also look at events which happen at the same time in B. This is a very natural approach: An observer analyzing the registered events is typically interested in what happened at different places at the very same point in time.
This is what we refer to as an observer’s “perception” of a situation in space: We cut a slice through space-time at a specific time-coordinate.
We have derived that the events E1 and E2R in frame A do support a perception of simultaneous events in frame B. Respective distances in the spatial coordinates of the rod’s end points are:
Consistency check: Note that between tB|E2R = 0 and tB|E2 = γ • νx / c2 • L the right end of the rod consistently moves in B to the following xB position
This is indeed the xB-coordinate of event E2.
Respective considerations for respective E3 and E4R lead to completely analogous results. What do our derived shifts in space and time coordinates for the right end point of the rod mean geometrically?
In frame B the rod moves with a constant inclination angle Ψ relative to the x-axis and thus also relative to the slot
In frame B any point on the rod to the right of its left end xr,l,B crosses the horizontal lines given by yB = h and yB = 0 later then the rod’s left edge. This means that observers in B, who measure positions on the rod at a given equal point in time, register a rod which not only is moving diagonally towards the slot, but which is also rotated against the xB-axis:
Frame B: The rod shows a constant inclination angle Ψ with a horizontal line through its left end point.
I have schematically depicted the situation as seen in frame B at tB = tstart,B
in the next illustration.
Note: Scaling, velocity component relations and angles are only schematic and may not reflect realistic conditions.
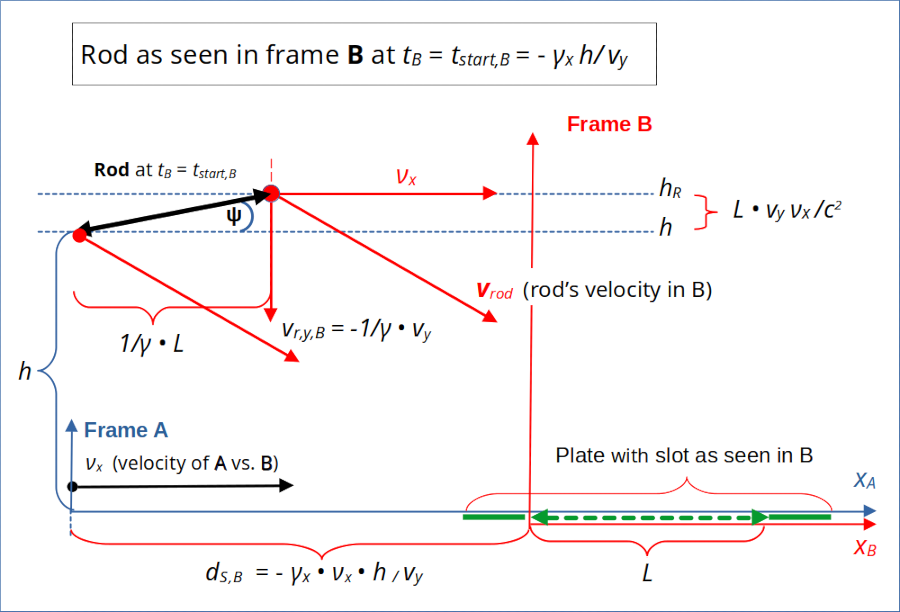
Illustration 3: The rod according to the initial conditions as seen in frame B at tB = tstart,B
At collision time tB = tA = 0, we get the following resulting situation (again depicted schematically):
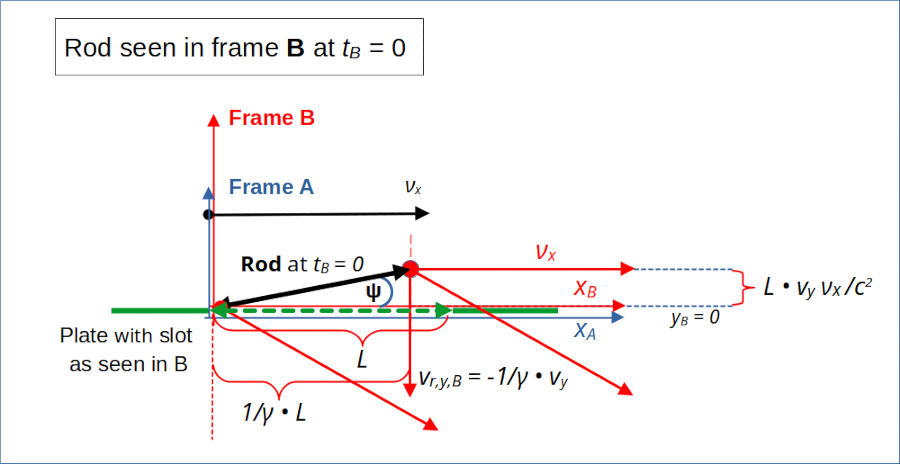
Illustration 4: Rod and slot seen at collision time tB = 0 in frame B. An observer in B registers an inclination angle Ψ between the rod and the slot
From the perspective of B we deal with an object, the rod, which is moving diagonally. The rod’s horizontal velocity in B is given by the relative velocity νx of frame A versus frame B. In frame A the rod is oriented parallel to the x-axis. In frame B, however, the rod’s orientation exhibits a positive and constant inclination angle Ψ with the x-axis and parallel horizontal lines.
This rotational effect impacting elongated objects during a proper Lorentz Transformation between reference frames moving in 2-dimsnional scenarios is very well known in the literature on Special Relativity as the so called “Thomas-Wigner” rotation. We will stumble across it in forthcoming posts many times.
The inclination angle Ψ of the rod with the x-axis is given by
The angle’s sign obviously depends on the signs of the components of the object’s velocity components in frame B:
A falling object moving in positive x-direction in B would show a positive inclination angle. A falling object moving in negative x-direction in A would show a negative inclination angle. But an object moving in positive y-direction and in negative x-direction would again show a positive inclination angle.
Side remark: Our result is, by the way, directly related to the so called aberration effect in the STR. You may replace vy with c (for a vertically propagating light wave front in A coming from a star above) and interpret –vx as the observer’s movement (i.e. of B) relative to the star. Any telescope would have to be oriented vertically towards the incoming wave front in B, which shows the inclination Ψ (for vy = c, in this case). One can show with a bit of geometry that the angle for the telescope’s inclination against the y-axis is given by |Ψ|, with tan(|Ψ|) ≈ β (neglecting the deviation of γ from 1.0). This is indeed the correct classical result for vx << c.
Due to the squared velocity of light in the denominator, Ψ is a relative small angle. The angle Φ of the rod’s velocity vector vrod in B versus the x-axis (!) is negative in our case and given by :
The absolute value of this angle Φ can become significantly bigger than Ψ.
Side remark on the “time phase”
The attentive reader has of course noticed that the so called general time shift or time phase seen in a moving frame B for events which happen at the very same time tA in A was of major importance for our derivation:
This time shift or time phase is obviously proportional to the distance of events in A from the origin of A. This corresponds to the statement that synchronized clocks along the x-direction in A appear out of synchronization in frame B. I admit, that this distance dependency is a bit hard to swallow. But it is a basic consequence of the Lorentz Transformation. In addition, depending on the sign of the relative velocity between the frames in question, the shift effect can go in both directions. I will use this a forthcoming post to build a scenario in which the rod actually moves through the slot without touching the plate.
The events marking the end-points of the rod define its movement and orientation completely
A reader has asked me why it is sufficient to regard events related to the end points of the rod. The reason is that we deal with linear transformations. Also the correction for time shift is a linear procedure. They transform straight lines or line segments into straight lines or line segments – if all points are measured simultaneously in both frames.
You can test this by transforming a point located somewhere on the rod from frame A to B – and correcting for simultaneity in the target frame. You will find that the point in B will reside on the line connecting the transformed end points of the rod – and the the ratio of the distances to the end points of the rod are the same in B as in A.
Conclusion
In this post we have looked at two reference frames
- a frame A with a thin and lengthy rod (with proper length L) oriented in parallel to the x-axis and falling vertically downwards,
- a frame B moving horizontally towards frame A in negative direction with a constant relative velocity –νx and containing a slot at a y-level of yB = 0 = yA. The slot also has proper length L and its left end is fixed at xB = 0.
We have studied some first consequences of the Lorentz transformation for the description of the rod’s movement by an observer with synchronized clocks in frame B. A major result was that an observer in B registers the movement of the rod not only as a diagonal movement, but measures a constant small inclination angle Ψ between the rod and the slot.
We have also seen that events happening at the same point in time in A exhibit a time difference in frame B.
In addition, the transformation results indicated that the right end of the rod may touch the plate later and at a larger distance to the right of the slot’s right end in B than expected. In the next post
I will look closer at this distance and discuss a consequence – namely that in our “collision scenario” the rod will not move through the slot unharmed – neither in frame A, nor in frame B.
Stay tuned …