In this post series we now look a bit deeper into the rod/slot paradox of Einstein’s Theory of Special Relativity. We now want to compare our “collision scenario” and “transit scenario” directly and point out a major qualitative difference. This requires a transformation to a frame which makes such a direct comparison possible. In the preceding post we have therefore prepared a transformation of our collision scenario from a setup frame A to a diagonally approaching frame W. Frame W will later be related to the frame Z which we used in this series to set up the transit scenario. (See below and previous posts.) W co-moves horizontally with the slot and vertically with the rod approaching the origin of the frame A used to define the collision scenario. The origins of W and A meet at tW = tA= 0.
In this post we apply a Lorentz Transformation [LT] to the physical objects of the collision scenario to get respective data in frame W. We continue to work on a rather elementary mathematical level.
We will find that both objects are perceived rotated with respect to the line of relative motion between the frames – in comparison to the situation given in A. There is also an angle between both objects when their left ends meet at the origin of W at local time tW = 0. We will also see that in W the slot is oriented in parallel to the image of the x-axis of A and fully aligned with it at tW = 0.
Previous posts:
- Post I: Special relativity and the rod/slot paradox – I – seeming contradictions between reference frames
- Post II: Special relativity and the rod/slot paradox – II – setup of a collision scenario
- Post III: Special relativity and the rod/slot paradox – III – Lorentz transformation causes inclination angles
- …
- Post IX: Special relativity and the rod/slot paradox – IX – transit scenario and measurements by an observer co-moving with the rod
- Post X: Special relativity and the rod/slot paradox – X – details of the transit scenario as seen by the rod
- Post XI: Special relativity and the rod/slot paradox – XI – Lorentz Transformation between slot and rod for the transit scenario
- Post XII: Special relativity and the rod/slot paradox – XII – images of x,y-coordinate axes after Lorentz transformation to a diagonally moving frame
We use the abbreviations :
CCS : Cartesian coordinate system. LT: Lorentz Transformation.
Relation of frames W and A – and LT along the line of relative motion
For a better comparison of our two scenario we need the results of a LT of the coordinates of our physical objects from a setup frame A to a diagonally approaching frame W. We use a standard (and mathematically simple) boost along the line of relative motion of the frames. I.e.: We want to get the coordinates of the slot’s and rod’s end in an Cartesian coordinate system of W with an xrel,W-axis aligned with the line of relative motion. We use results of the preceding post.
The horizontal velocity of W is adapted such that the left ends of the rod and slot meet at tA = tW = 0, when also the origins of the frames coincide.
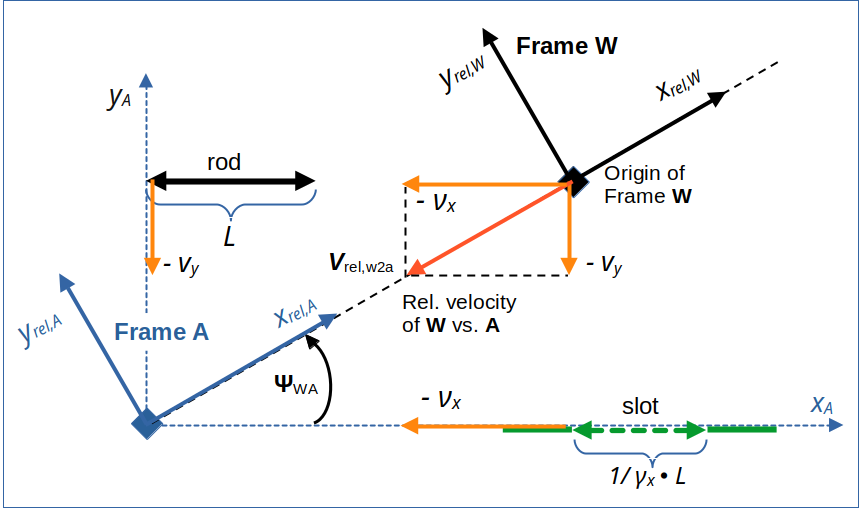
Illustration 1: A diagonally approaching frame W in our collision scenario, which set up in a frame A. For a Lorentz Transformation from A to W we use rotated Cartesian coordinate systems with x-axes oriented along the line of relative motion of the frames.
To apply the boost along the line of relative motion we first transform velocity and position vectors to the rotated CCS in A at tA = 0. We use the quantities, terms and abbreviations defined in the 12th post of this series. Relativistic factors to be used along the line of relative motion are defined by:
We sometimes use “rel” as a subscript instead of “w2a” to indicate velocities along the line of relative motion of the frames and coordinates along this line.
It is clear that at time tA = tW = 0 the left ends of the slot and the rod meet at the origins of A and W, which coincide at this point in time:
Event coordinates for the slot’s right end in A
Regarding the right end of the slot we have to focus on an event which gets transformed to the specific point in time tW = 0 in W. This ensures that we get x/y-coordinates (of both of the slot’s ends) which an observer in W measures simultaneously, namely at tW = 0.
In the rotated CCS of W a LT gives us the following transformed time coordinate (see the 3rd post)
The reader of the previous posts recognizes this returning pattern.
Event coordinates of the right end of the slot in the rotated CCS of A
Due to the purely horizontal movement of the slot in A the xA-coordinate value xs,r,A of the slot’s right end on the standard xA-axis has to be changed from its value at tA = 0
to
The respective coordinate xs,r,rel,A in the rotated CCS is found by a projection on the relative line of motion:
For the time ts,r,rel,A (to be chosen) we therefore get the condition:
From this point in time we get the xA-coordinate of the slot’s right end at time ts,r,rel,A:
The respective xrel,A-coordinate in the rotated CCS is:
The respective yrel,A-coordinate in the rotated CCS is given by
We now have all necessary data in A to perform the boost along the line of relative motion to our (rotated) coordinate system of W for the point in time tW = 0.
Lorentz Transformation of slot data to W
We transform xs,r,rel,A by the standard boost along the line of relative motion:
So,
You can also check that
Length of the slot in the diagonally moving frame W
We get the resulting length of the slot by applying Pythagoras to the data given at tW = 0. Remember that at this point in time the left ends of the rod as well as of the slot coincide with the origins of A and W.
Not too surprising – if you dwell a bit on it.
Angle between the slot in W and the line of relative motion
The slot resides below the line of relative motion in W – due to the negative ys,r,rel,W-coordinate of its right end. So, we get the angle Ψs,rel,W between the slot and the line of relative motion by
Remember
Therefore
For the last inequality we have assumed that the angles have the same positive orientation.
The interesting thing (but to be expected) thing is now that Ψs,rel,W is identical to the angle of the image xxA,W of the standard xA-axis (of A) with the line of relative motion in W (see the results of the 12th post):
The angle between the slot and line of relative motion is bigger in W than the corresponding angle in frame A and is equal to the angle of the image xxA,W with the line of relative motion. Both appear rotated outward in comparison to the situation in the original frame A.
We saw something qualitatively similar when we discussed the angle of the xC-axis vs. the line of relative (diagonal) motion of frame C vs. frame B in the 4th and 5th posts of this series.
Conclusion
In this post we have derived the coordinates of the slot relative to a coordinate system of W with an x-axis aligned with line of relative motion (of W vs. frame A). We found that the length of the slot in W is identical to its proper length L (at rest). Furthermore the slot aligns with the transformation’s image of the xA-axis of frame A in W . We will later see that this result was to be expected. In frame W the angle between the slot and the line of relative motion is bigger than in frame A. This reflects a rotation outward due to relativistic effects.
In the forthcoming posts we will have look at further details of the situation in W at time tW = 0. The topic of the next post is a Lorentz Transformation of the rod to our diagonally moving frame W:
Later on we will analyze the transformed velocity vectors of both the slot and the rod. One result will be that the velocity vector of the slot is perpendicular to the slot’s orientation in W – as it should be according to other theoretical considerations.
Stay tuned …