In the preceding two posts we have derived x– and y-coordinates of the rod’s and the slot’s ends in a new frame W. W‘s origin moves in a diagonal direction vs. the origin of our setup frame A, which we used to define the collision scenario (see previous posts, in particular the 12th post of this series). In W both the rod and the slot are perceived as being rotated vs. the line of relative motion between W and A. The rotation angles are different.
In this post we shall derive and analyze the velocities of the rod and slot in W. We will use the results in yet another post to predict an inevitable collision in W, too.
Previous posts:
- Post I: Special relativity and the rod/slot paradox – I – seeming contradictions between reference frames
- Post II: Special relativity and the rod/slot paradox – II – setup of a collision scenario
- Post III: Special relativity and the rod/slot paradox – III – Lorentz transformation causes inclination angles
- …
- Post XII: Special relativity and the rod/slot paradox – XII – images of x,y-coordinate axes after Lorentz transformation to a diagonally moving frame
- Post XIII: Special relativity and the rod/slot paradox – XIII – Lorentz transformation of the collision scenario to a diagonally moving frame
- Post XIV: Special relativity and the rod/slot paradox – XIV – angle between colliding rod and slot in a diagonally moving frame
Lorentz Transformation of velocity components between A and W
The rotated coordinate systems used in the last 4 posts had an x-axis (xrel,A) aligned with the line of relative motion of W vs. A. In A the x-coordinate axis points into the direction of W. However, W approaches A in negative xrel,A – direction. The absolute value of the relative velocity between W and A is just vrel.
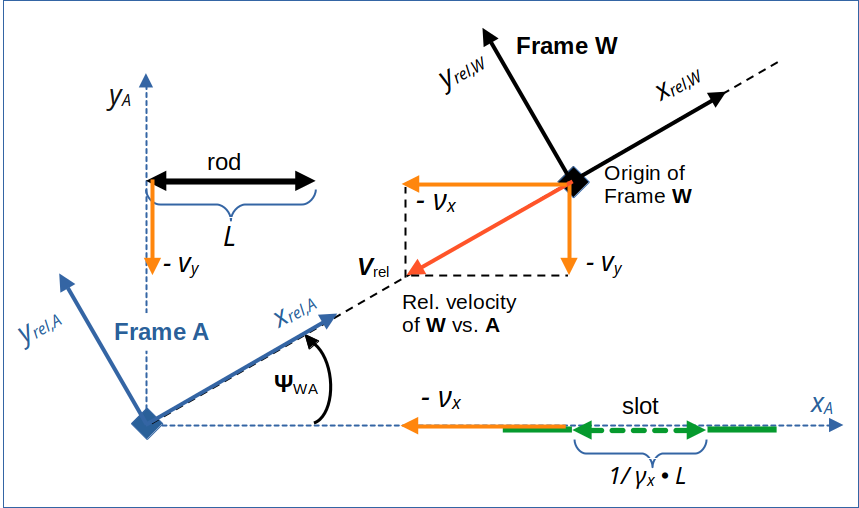
Illustration 1: A diagonally approaching frame W in our collision scenario, which was set up in a frame A (see the first 3 posts of this series). Rod and slot meet each other at tA = tW = 0. For the Lorentz Transformation from A to W we use rotated Cartesian coordinate systems with x-axes oriented along the line of relative motion of the frames.
I first want to remind you of some formulas regarding the transformation of velocity components of objects moving in reference frame A to respective components in the approaching frame W. We just have to adapt the formulas given in the 3rd post of this series. We name the component of the velocity of an object O in A parallel to the line between the origins of W and A vo,x,rel,A. The perpendicular component gets the name vo,y,rel,A. Then we have
The relativistic factors related to vrel are
Transformation of the slot’s velocity components to frame W
We use some results of the preceding posts and hop over details of the derivation. We first have to find the components of the slot‘s velocity vector vs,A along the line connecting the origins of A and W. This line has an inclination angle ΨWA relative to the standard coordinate axis xA. We call the component parallel to the rotated axis xrel,A in A (aligned with the line) vs,x,rel,A. The component along the perpendicular axis yrel,A is named vs,y,rel,A. We calculate them to be
Thus
The denominator is equivalent to
We conclude
After some intermediate steps we get for the absolute value of the slot’s velocity vs,W in W
The angle Ψsv,rel,W of the velocity vector with respect to the line of relative motion (of W vs. A) is given by
We compare this to the angle of the slot with the line connecting the origins of frames A and W (see previous posts)
to derive
This also follows from the sine values. Meaning:
The velocity vector of the slot in W is perpendicular to the slot itself there.
See illustration 2 at the end of this post.
Transformation of the rod’s velocity components to frame W
The velocity components of the rod in A parallel and vertical to the line of the frames’ relative motion are:
Consider the negative signs! The LT tells us
The denominator has the following value:
Using this gives
For the absolute value of the rod’s velocity vr,W in W we get (after some steps)
The angle Ψrv,rel,W of the rod’s velocity vector with respect to the line of relative motion (of W vs. A) is given by
We compare this to the angle of the rod with the line connecting the origins of frames A and W (see preceding posts)
Meaning:
The velocity vector of the rod in W is aligned with the rod itself there.
See illustration 2 below.
Schematic sketch of the perceived situation
The situation in W at tW = 0 is depicted below.
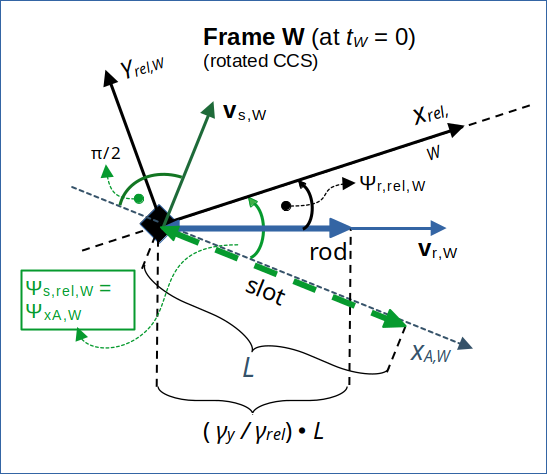
Illustration 2: Collision scenario seen from a diagonally approaching frame W. The scenario was set up in a frame A (see the first posts of this series). For the Lorentz Transformations from A to W we use rotated Cartesian coordinate systems with their x-axes oriented along the line of relative motion of the frames. The velocity of the slot is oriented perpendicular to the slot. The velocity of the rod is aligned with the rod’s orientation.
There are good reasons why the velocities vectors must be oriented in W the way which we have derived above. We will come back to this point in a future post.
Conclusion
We have investigated how the velocities of the rod and the slot are perceived in a frame W, which approaches the setup frame A on a diagonal path. We found that the slot’s velocity is perpendicular to the slot’s orientation in W. The rod’s velocity transports the rod aligned with its orientation. These were interesting findings by themselves.
However, we still have to show that the situation perceived in W at tW = 0 leads to an unavoidable collision between the rod and the slot. This is the topic of the next post
in this series.
Stay tuned ….